|
Shaoting Peng I am a second-year Ph.D. candidate advised by Dr. Katherine Driggs-Campbell at University of Illinois Urbana-Champaign (UIUC) Electrical and Computer Engineering (ECE) department. I earned my Master degree in Robotics at GRASP Lab of University of Pennsylvania, co-advised by Dr. Nadia Figueroa and Dr. Ruzena Bajcsy. My research interests currently lie in algorithmic human-robot interaction (HRI). Prior to graduate study, I received my Bachelor degree in Computer Science and Technology from ShanghaiTech University in 2022, advised by Dr. Xuming He. |

|
News |
|
|
Research Projects |

|
Tactile-Based Human Intent Recognition for Robot Assistive Navigation
Shaoting Peng, Dakarai Crowder, Wenzhen Yuan, Katherine Driggs-Campbell ICRA 2026 Video (TBD) / Arxiv / Code (TBD) Proposed an assistive navigation system that integrates a tactile skin on a Stretch 3 robot to "feel" a user's grasping patterns, allowing it to infer navigational intent and provide reactive mobility support for individuals with disabilities. |
|
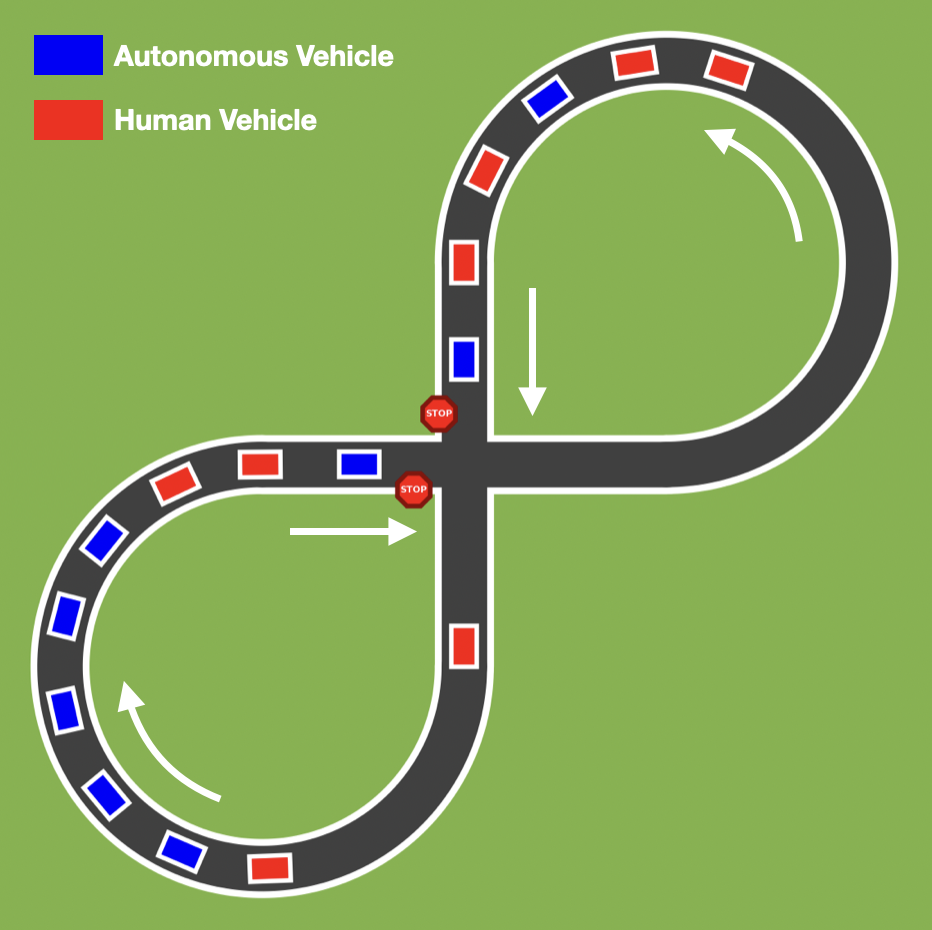
Trust-Aware Embodied Bayesian Persuasion for Mixed-Autonomy
Shaoting Peng, Katherine Driggs-Campbell, Roy Dong Preprint Arxiv Proposed a Bayesian persuasion-based framework supported by two novel theorems that formally account for heterogeneous human trust and the physical embodiment of signals to enhance the safety and efficiency at mixed-autonomy intersections. |
|
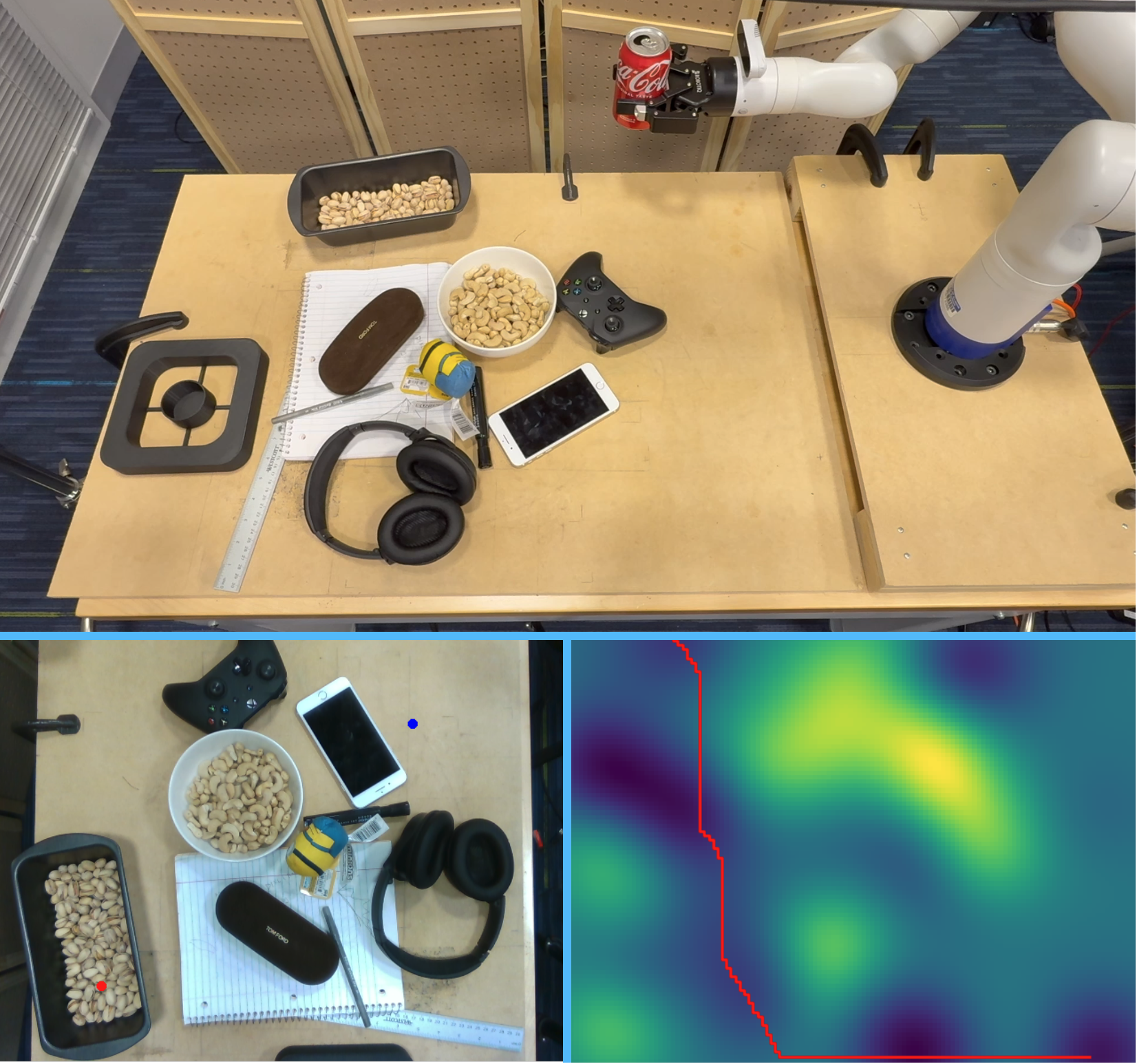
Towards Uncertainty Unification: A Case Study for Preference Learning
Shaoting Peng, Haonan Chen, Katherine Driggs-Campbell RSS 2025 Project Page / Video / Arxiv / Code Proposed Uncertainty-Unified Preference Learning (UUPL) that enhances robot preference learning by explicitly incorporating human uncertainty into the Gaussian Process framework with Laplace approximation and a weighted GMM. |
|
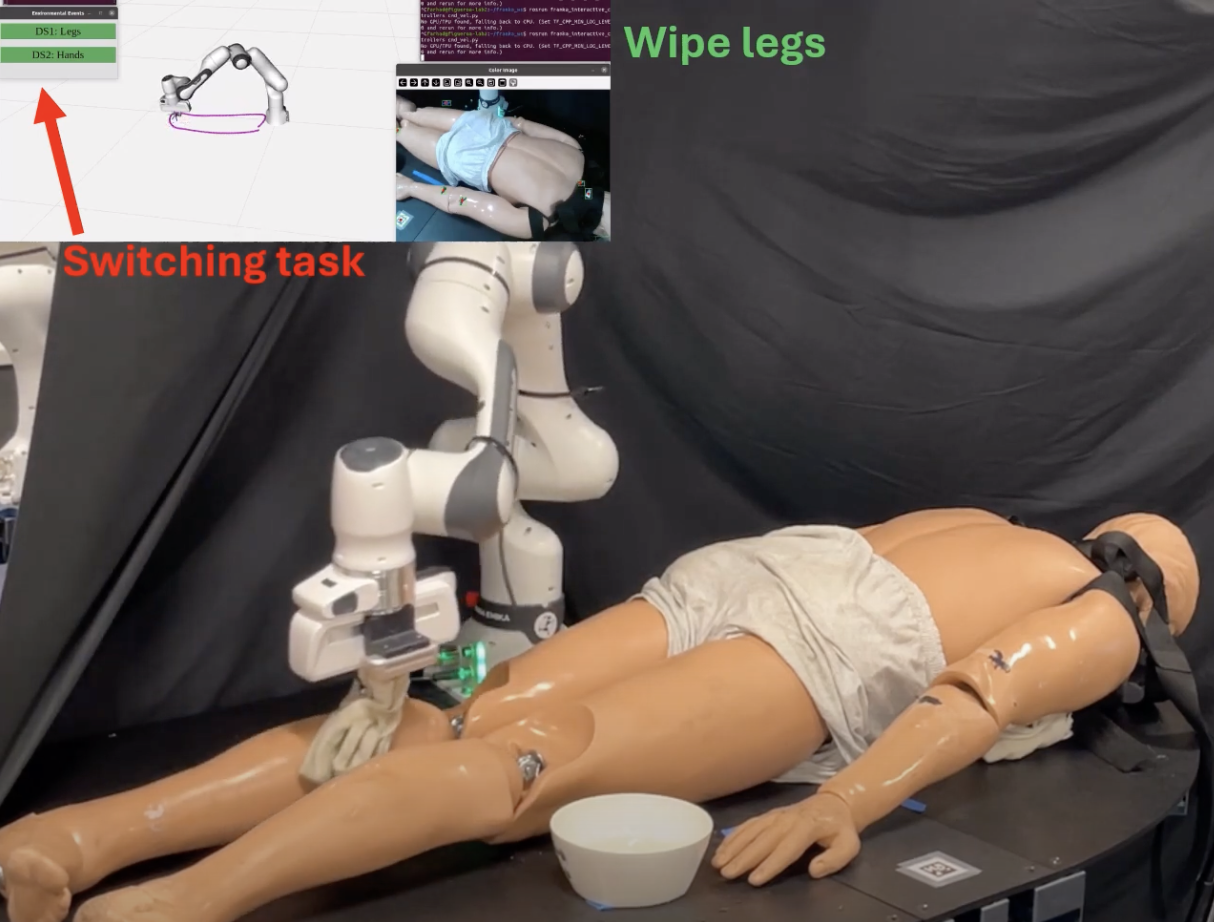
Reactive Temporal Logic-based Planning and Control for Interactive Robotic Tasks
Farhad Nawaz, Shaoting Peng, Lars Lindemann, Nadia Figueroa, Nikolai Matni IROS 2024 Project page / Video / Arxiv / Code Proposed a modular control architecture that generates both safe and reactive motion plans for human-robot interaction by integrating temporal logic-based discrete task level plans with continuous dynamical system (DS)-based motion plans. |
|
A Robust Filter for Marker-less Multi-person Tracking in Human-Robot Interaction Scenarios
Enrico Martini, Harshil Parekh, Shaoting Peng, Nicola Bombieri, Nadia Figueroa RO-MAN 2024 Project page / Video / Arxiv / Code Proposed a filtering pipeline that refines incomplete 3D human pose estimation using a single RGB-D camera to address occlusions and mis-detections, reducing unexpected robot jittering and enabling smoother interaction. |
|
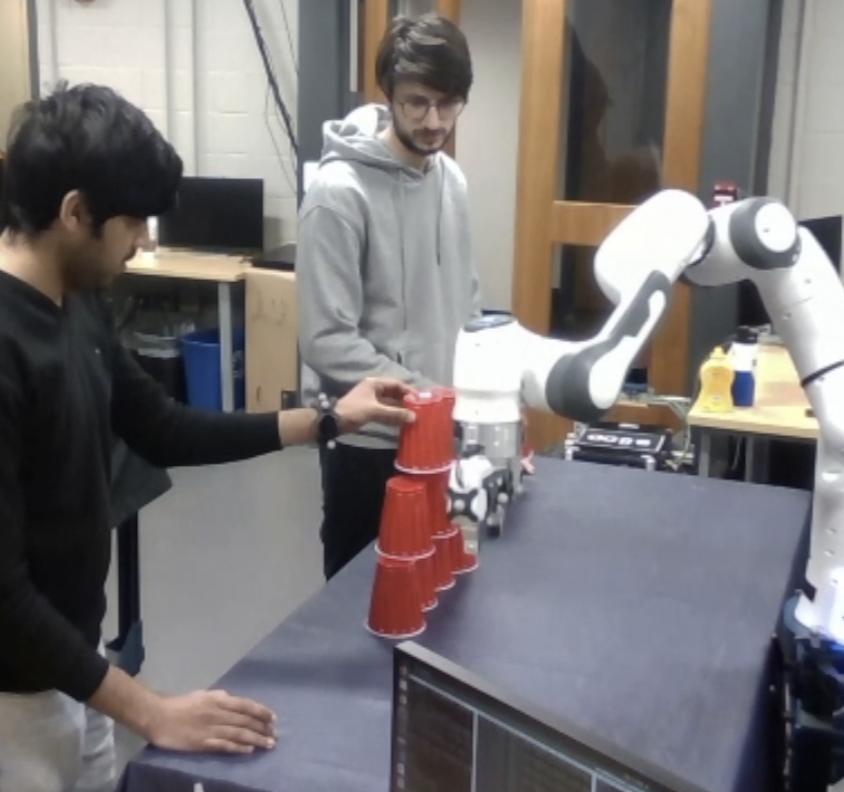
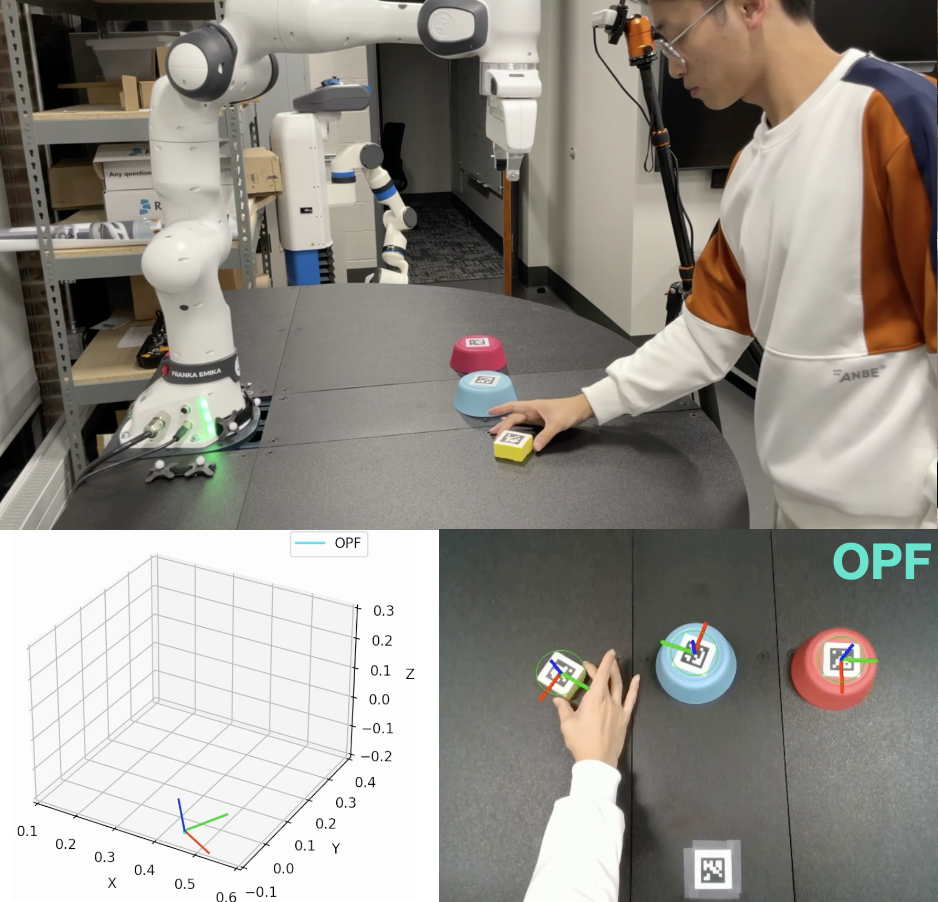
Object Permanence Filter for Robust Tracking with Interactive Robots
Shaoting Peng, Margaret X. Wang, Julie A. Shah, Nadia Figueroa ICRA 2024 Project page / Video / Arxiv / Code Proposed a set of assumptions and rules to computationally embed ''object permanence'' into a particle filter scheme to form the 6-DoF object permanence filter (OPF) for occlusion-aware robust perception. |

|
On the Feasibility of EEG-based Motor Intention Detection for Real-Time Robot Assistive Control
Ho Jin Choi \(^\dagger\), Satyajeet Das \(^\dagger\), Shaoting Peng \(^\dagger\), Ruzena Bajcsy, Nadia Figueroa ICRA 2024 Project page / Video / Arxiv Investigated the feasibility of using electroencephalogram (EEG) to achieve binary motor intention classification for robot assistive control in real-time. |
\( \dagger \): Equal contribution
Education |

|
University of Illinois Urbana-Champaign August 2024 - May 2029 (anticipation)
|
 |
University of Pennsylvania September 2022 - May 2024
|

|
ShanghaiTech University September 2018 - June 2022
|
Miscellanea |
|
|
|
This template is a modification to Jon Barron's website. |